
6.1.3 Dynamic Compaction
Dynamic compaction (DDC, heavy tamping, dynamic consolidation, etc.) is a cost-effective method of soil compaction whereby a heavy weight is repeatedly lifted and dropped from a height, impacting the ground surface with a readily calculated impact energy (Figures 6.12 and 6.13). Costs are reportedly about 2/3 that of stone columns, with up to 50% savings over other deep densification alternatives (www.wsdot.wa.gov). Dynamic compaction is one of the oldest soil improvement methods known, reportedly used by the Romans prior to 100 ad and in the United States as early as the 1800s (Welsh, 1986).

Courtesy of Hayward Baker (top) and Densification, Inc. (bottom).
The name does not accurately portray the actual loading and energy transmission processes. One of the greatest misnomers regarding dynamic compaction is that it is a surface ground treatment, as loads are applied at the surface. But dynamic compaction, as opposed to conventional shallow compaction of controlled fill, is a process of densifying soils at significant depths by applying a large impact energy at the ground surface. Upon impact, craters as deep as six feet or more are created, which must then be backfilled prior to additional compaction passes and ultimately at the completion of the compaction process. But the densification at depth occurs as a result of the dynamic wave energy that is transmitted through the ground.
The main objectives of dynamic compaction are to improve strength and compressibility characteristics by either creating a uniform raft of densified material, or by compacting at locations where concentrated loads (e.g., column loads) will be applied. Improved soil properties result in increased bearing capacity and reduced settlements, including differential settlements. Dynamic compaction often allows for construction of conventional spread footings by providing bearing capacity of typically as much as 100-150 kPa (2000-3000 psf).
Dynamic compaction is suitable for densification of loose sand deposits such as those typically occurring in coastal, glacial, and alluvial deposits, as well as for dredged or hydraulically placed fills. This method has also been successfully applied to mine tailings, landfills, collapsible soils, sites underlain by sinkholes, and so forth (Zekkos et al., 2013). It is one of the better alternatives to densification of heterogeneous fills, and fills containing large debris that may create obstructions for other remediation techniques, such as stone columns or rigid inclusions (www.menard-web.com). Results are best for well-drained, high permeability soils with low saturation, although some satisfactory results have been reported for improvement of silty soils with the aid of PVDs or stone columns (or composite stone columns employing supplemental PVDs), and by providing time delays to allow for the dissipation of generated pore pressures (Dise et al., 1994; Shenthan et al., 2004). In certain conditions, saturated soils will be temporarily liquefied, allowing easier rearrangement and ultimately a tighter, denser packing upon dissipation of pore pressures. Because of this phenomenon and the benefits it can provide, “rest periods” between drop phases are sometimes specified, during which pore pressure dissipation can be monitored with piezometers to assure completion. This method is not appropriate for saturated clay soils.
Applications consist of dropping a heavy tamper (weight) from a specified height a calculated number of times at precisely determined locations in a pattern at the site. Drop patterns usually consist of primary and secondary (and occasionally tertiary) grids such as depicted in Figure 6.14. Grid spacing is typically about 3-7 m (9-21 ft). The weights typically range from 6 to 30 tons (up to 40 tons), and the drop heights typically range from 10 to 30 m (30-100 ft), sometimes more.

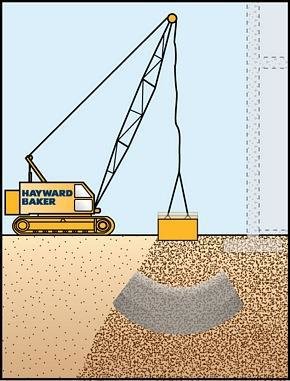
Figure 6.14. Example of grid pattern for DDC.
Effective densification is typical to depths of 10 m (or more with very big rigs and weights). The greatest improvement usually occurs between 3 and 8 m (10-25 ft) below the ground surface, with diminishing degrees of improvement at greater depths. The surface layers (surface to approximately 1-3 m) must be recompacted due to the disruption by the impact loads and lack of sufficient confinement. In order to estimate the required compaction effort using dynamic compaction, the Menard formula is generally followed:
where Z is the (required) treatment depth, M the tamping mass (tons), H the fall height, n the (soil dependent) constant, typically between 0.3 and 0.6 for sandy soils.
Greater depths have been effectively densified using a system known as high energy dynamic compaction, where maximum efficiency is achieved with the complete free fall of the weight through the use of a specially designed weight release system (www.menard-web.com). As an extreme case, Menard developed a “Giga” compactor for deeper densification at the Nice airport in France (Figure 6.15).
Designing a dynamic compaction project application requires determining the most efficient application of energy at the site. This may be initially determined based on data from site investigations. Actual DDC program applications are typically fine-tuned, or modified, based on test sections or after field testing of preliminary applications (i.e., after an initial phase of drops). Field measurements of penetration (or “crater depths”) and pore pressures are continuously monitored to allow for adjustments to the field program. Measurements of crater depths are also used in a manner similar to proof rolling in that deeper crater depths indicate “softer” or “weaker” locations that may require further attention.
Dynamic Compaction and Dynamic Consolidation of Soils
Nathan Narendranathan, Eng Choy Lee, in Ground Improvement Case Histories, 2015
12.2 Overview of dynamic compaction theory and methods
Dynamic compaction is a ground improvement technique for compacting fills as well as soft or loose natural soils. It has proved to be an effective and economical alternative to deep vibratory compaction and the smooth wheel vibratory roller compactor. Table 12.1 presents a summary of the various vibro and dynamic ground-treatment techniques currently available.
Table 12.1. Summary of vibro and dynamic ground treatment techniques
| Method | Benefits | Limitations | Typical production | Applications |
|---|---|---|---|---|
| VF | Fast, in situ densification of loose sands to depths of up to 30 m; economical and sustainable; significantly reduces the threat of liquefaction in the event of seismic shock | Generally sands with less than 10% fines; the upper 2–3 m may not be very dense and may require other treatments | From 250–300 m per flot/day; spacing varies from 2–4.5 m depending on the type of flot used | Extremely effective for sand compaction tank farms, ports, and marine structures; can go up to 30 m; can be done in marine conditions |
| VSC | Bearing capacities between 100–200 kN/m2 typically achievable; settlement reduced; accelerates the dissipation of excess pore water induced by the loads; economical alternative to pile foundations for a vast array of sectors and applications, including housing, road, rail, ports, commercial, retail, industrial, education, medical, wind farms, utilities, leisure, and military projects | Not a very long history of application for deep (> 20 m) soft clays; creep effects not fully studied yet in clays; wet method will produce slurry run off, dry method is more expensive and slower but does not produce slurry | From 250–300 m per flot/day; spacing varies from 3–5 m depending on the type of flot used, soil type, and loads; diameters vary from 600 mm to 1.2 m | Can be used in granular soils, mixed fills, and cohesive soils; housing, road, rail, ports, commercial airfield, retail, industrial, education, landfills, medical, wind farms, utilities; can be done in marine conditions |
| DDC | Suitable, for use on contaminated or obstructed sites; levels can often be reduced by up to 10% of the depth of fill being treated; extremely economical and can be used for large sites; has been used up to 20 m depths | Not suitable within 50 m or even 100 m of settlement-sensitive structures and in urban built-up areas; top 2–3 m may not be as compact as deeper layers; cannot be done underwater | 50–100 m2 per day/machine | Used for redevelopment of old domestic landfill sites to collapse existing voids and accelerate the long-term settlement between piled structures and the surrounding hard-standing areas |
| RIC | Fast and economical; higher productivity; safer compared to DDC | Not suitable within 6 m of structures; improvement not reported beyond 10 m; not suitable for soft clays; cannot be done under water | 500–800 m2 per day/machine | Can be used for a variety of infrastructure; can be used to complement vibroflotation and DDC |
| HIEDYC | Lowest cost per m2; highest productivity compared to all other techniques; ability to work within 3 m of existing developments; useful for both foundation and pavement subgrade stabilization; broad application potential and flexibility to complement DDC and VF methods | Needs larger sites as HIEDYC moves at speed (generally site has to be 25 m wide by 100 m long minimum); improvement not reported beyond 9 m | 2000–5000 m2 per day/machine | Used for civil infrastructure, oil tanks, pipelines, pavements, mine haul roads. and dumps; rock crushing can be used to complement vibroflotation and DDC; can be used in clays with PVD |
VF, vibroflotation; VSC, vibro stone columns; DDC, deep dynamic compaction; RIC, rapid-impact compaction; HIEDYC, high impact energy dynamic compaction; PVD, prefabricated vertical drain
Dynamic compaction requires a controlled application of dynamic stresses to the ground surface. The dynamic stresses are generated by the following methods.
12.2.1 Deep dynamic compaction with drop weights
The deep dynamic compaction (DDC) technique involves using a crane to drop weights of between 5 and 20 tons, from heights of up to 20 m. Figure 12.1 technique is best suited to large, open sites where few obstructions are present.
Depending on the weight used and the drop height, the depth of treatment could vary from 8–20 m in sands. The number of drops, weights used, and the height of the drops depend on the required posttreatment bearing capacity, settlement performance, and soil conditions. Between two and five passes are generally required with the first or earlier high-energy treatment passes aimed at treating the deeper soil layer and a final low-energy contiguous tamping pass to compact the shallow near-surface soils disturbed during the earlier higher energy treatment passes. DDC is commonly used in reclaimed areas and landfill rehabilitation to provide a strong ground with less susceptibility for settlement or differential settlement.
The authors’ experience has shown that DDC can be used in clays in combination with prefabricated vertical drains or jute drains that can withstand the impact of the drop weight.
12.2.2 Impact rolling using high-impact energy dynamic compaction
High-impact energy dynamic compaction (HIEDYC) ground treatment imparts vertical energy into the ground to depths ranging from 2–5 m. In view of the near vertical energy input, the spread of energy along the ground surface as surface waves in minimized. It is the surface waves that generally cause the vibration to be transmitted along the ground to adjacent structures. In conventional compaction, especially with the use of vibrating rollers, considerable energy is transmitted as surface energy. This surface energy is normally confined to the top 300 mm of the soil under compaction and, thus, deep compaction is not possible with conventional static or vibratory rollers with a round drum.
In conventional deep dynamic compaction using large drop weights of 10–15 ton weights, the upper 1–3 m of the fill is disturbed and is not compacted. The upper 1–3-m layer will then require separate compaction operation making the time and cost involved for an approach using vibratory rollers.
Conventional dynamic compaction is relatively expensive and slow. Furthermore, conventional dynamic compaction also causes severe vibration due to large amounts of surface energy dissipating during the dynamic impact of the large flat steel drop hammer. With the use of the HIEDYC ground treatment process, the levels of vibration are relatively low, making it suitable for using close to existing structures. HIEDYC has been used within 3 m of existing structures.
HIEDYC ground treatment relies on a towed noncircular module of three, four, or five sides (Figure 12.2) that compacts as it rotates around a “corner” and “falls” to impact onto the ground (Figures 12.3 and 12.4). Figure 12.5 shows the three-sided (HIEDYC 3) module at work compacting loose silts.

Figure 12.5. Ground improvement work using CDYC in progress.
HIEDYC ground treatment has found application on loose soils for subdivisions, road subgrades, airport subgrades, landfills, sand and dredged fill, gravels and crushed rock, mine haul roads, and waste materials of various types including refuse, industrial waste, and building rubble. Significant density and strength improvement is usually obtained to 2–5 m (or more) in sands and waste materials, and is far more than any conventional static or vibratory roller. Improvement up to 9 m depth has been reported.
The HIEDYC ground treatment creates a uniform density gradient across a site, developing a uniform soil “raft” that has a thickness of 2–5 m depending on the degree of ground treatment and the type of soil. This can be used for redesigning stronger shallow foundations or pavements.
HIEDYC has been deployed for land development near existing buildings housing vibration-sensitive computer-controlled equipment, housing developments next to existing houses, and existing industrial buildings. In addition, work for container ports and marine oil terminals were all undertaken near existing operating facilities. In all instances, excessive vibration was not encountered. This is primarily because the HIEDYC compactor drums are configured to input energy in a vertical direction minimizing the surface waves that normally cause excessive vibration near adjacent structures.
Vibration is normally > 9 mm/s (peak particle velocity) at a distance of 6–10 m. At distances of more than 20 m the vibrations are less than 3 mm/s peak particle velocity. Noise generated by the equipment is similar to noise generated by construction equipment such as wheel loaders or dozers on construction sites, and is less than 70 dB at 10 m away.
The high productivity of the HIEDYC equipment enables very fast and relatively low-cost ground treatment compared to DDC or RIC methods. HIEDYC treatment is possible for landfills, sands, silts, and clays. However, in very soft saturated clays it is not effective unless combined with prefabricated vertical drains. This scheme has been adopted in tailing ponds and airports by the authors.
12.2.3 Rapid-impact compactor
The rapid-impact compactor (RIC), also known as a controlled dynamic compaction (CDYC) unit, is generally fitted to a tracked base excavator of 35–70 ton weight, which provides the dual benefit of allowing improved mobility and site accessibility. Having the RIC mounted on a tracked machine gives it the versatility to move about in narrow and limited height spaces such as within existing warehouses and urban area lots. Also being mounted on a tracked excavator, transport to site is easier.
CDYC is similar to RIC, and it is the preferred term of Infra Tech. Infra Tech’s experience has been that CDYC achieves deep compaction in sand and silts greater than the target 7 m depth when the soils were above the water table. CDYC compaction has been deployed in compaction of loose sand at Australian Maritime Complex (AMC) Wharf, which has a high water table of approximately 1.5 m below the existing ground level.
Dynamic energy is imparted by dropping a weight by hydraulics from a controlled height onto a foot plate of 1 or 1.5 m2 or a circular plate. The RIC/CDYC impacts the soil at a rate of 10–60 blows per minute using a 5-, 7-, 9-, or 12-ton drop weight. The drop height varies from 1–2 m. Energy is transferred to the ground safely and efficiently as the RIC’s foot remains in contact with the ground. No flying debris is ejected. This is quicker than conventional DDC, but the energy input is smaller per blow (9 t compared to 190 t using conventional cranes).
The compaction parameters (i.e., energy, blow counts, and soil penetration) are automatically controlled and monitored from the RIC’s cab with an onboard data acquisition system. The rapid-impact compactor employs an onboard computer to control impact set termination criteria and to record critical data. Acquired data at each impact point include total energy input, total penetration, and penetration of final set. Noise levels of 88 dB at 6 m have been measured.
At 30 m, the peak particle velocities have been measured to vary from 1.2–5 mm/s. Vibrations vary with material type, and increase as the degree of compaction achieved increases. Results to date indicate that without site-specific testing, a safe working distance to structures is 6 m.
Blows at each treatment position create imprints, which are subsequently filled with granular material. The pattern is then repeated at offset locations to provide treatments depths of around 3 m. The technique can usually be used within 10–15 m of sound structures. Spacing of blows can vary from 2–4 m. RIC/CDYC can be mixed with dynamic compaction on larger sites where nearby structures exist on the boundary of the site, thus increasing the area that can be treated by compaction techniques.
RIC/CDYC can be used in shallow granular fills containing contaminants where penetrative ground improvement techniques, such as vibro stone columns, would risk exposing contaminants to the atmosphere (see Table 12.2). RIC can also be employed on sites where ground contains coal waste deposits, which are potentially susceptible to spontaneous combustion (vibro stone columns are precluded due to the risk posed by friction generated by the vibroflot equipment in the ground).
Table 12.2. Typical depths of compaction using RIC
| Ground type | Total energy applied (t/m/m2) |
Depth of compaction (m) |
|---|---|---|
| Loose building waste | 150 | 4.0 |
| Ash fill | 150 | 3.5 |
| Select granular fill | 150 | 4.0 |
| Sandy silt and silty sand | 80 and 190 | 2.0 and 3.0 |
Source: After BRE, BR Report 458 (2003).
The authors’ experience is that both DDC and HIEDYC in combination with PVD can be useful for deployment in soft clays.
The Changi East Reclamation Project in Singapore
Myint Win Bo, … Victor Choa, in Ground Improvement Case Histories, 2015
9.4.3 Deep compaction of sand fill
Three types of deep compaction methods were deployed to densify the granular soil: dynamic compaction, MRC, and vibroflotation. The dynamic compaction method was used in the area where the required depth of compaction was 5–7 m. The MRC and vibroflotation methods were adopted in the areas where the required thickness of compaction was 7–10 m.
The effectiveness of dynamic compaction is dependent on the combination of weight, geometry of pounder, height of drop, spacing, number of drops, and total compactive energy applied. Experiments with different weight of pounder, height of drop, spacing, and number of drops were performed onsite to establish the most cost-effective combinations. The results of one of the experiments are shown in Fig. 9.18. The pounder used was 23 t. The height of drop was 25 m. The spacing between the pounding point was 7 m × 7 m. Only one pass of compaction was used. The number of drops per pass was 10. The total energy per point was 575 tons/m.

Figure 9.18. Cones resistance measured at various loctaions for 7m × 7m grid spacing (1) under the print, (2) intermediate point, (3) centroid point.
After compaction, CPT tests were carried out at three locations, as indicated in Fig. 9.18. The CPT results obtained from the three locations are presented in Fig. 9.18. The variation of cone resistance with the location or the distance from the pounding point can be clearly seen. The cone resistance achieved at the center of the pounding grid (point 1) was greater and more uniform than that at the pounding point itself (point 3). The cone resistance achieved at point 2, which was between the pounding point and the center of the grid, was in-between the cone resistance obtained at those two points. Based on the experiments, four compaction methods, as detailed earlier in Table 9.3, were selected and used in the project. A comparison of CPT cone resistances obtained before and after compaction conducted at a number of locations using Method 1 (see Table 9.3) is presented in Fig. 9.19. The effectiveness of the dynamic compaction can be clearly seen in the figure.

Figure 9.19. Comparison of CPT cone resistance obtained before and after dynamic compaction at various locations.
MRC does not require water for penetration. In this method, a steady-state vibrator was used to densify the soil. As a result of vibratory excitation, the friction between the soil particles is temporarily reduced. This facilitates rearrangement of particles, resulting in densification of the soil. A specially designed steel probe was attached to a vibrator, which had variable operating frequencies. The frequency was adjusted to the resonance frequency of the soil, resulting in strongly amplified ground vibrations and thereby achieving an efficient soil densification. Two types of MRC equipment and probes, as detailed in Table 9.4, were used. Experiments were carried out onsite to study the effect of the MRC compaction. CPTs were used to evaluate the compaction results.
The results of one experiment using the MRC MS-200 H system are presented in Fig. 9.20. MRC tests were conducted at a square grid of 5 m × 5 m (see Fig. 9.20). CPT tests were conducted at five locations of an even spacing of 1.25 m in-between two MRC compaction points. The cone resistance versus depth profiles obtained at the five locations before and after compaction are shown in Fig. 9.20. It can be seen that substantial improvement was achieved at every point mainly within a depth of 4–10 m and the effect of densification does not appear to be significantly affected by the distance from the compacting points with the grid. The sand fill before compaction appears to have been mysteriously densified, possibly by seepage force or cementation at depths near 1 and 4.5 m, as indicated by the high CPT values at those two locations. However, this localized densification effect, if it was real, had been destroyed by MRC compaction. Nevertheless, as the sand fill was recently deposited, cementation or other effects would not be a consideration.

Figure 9.20. Variation of cone resistance with distance from the probe point after compaction.
Several types of vibroflotation equipment, either electrically or hydraulically driven, were used in the project. The differences in the various types of vibroflotation equipment are shown in Table 9.5. Among the three types of vibroflotation equipment, the power rating is the same, but the centrifugal forces are different. The model numbers signify the amplitude. The amplitudes for V23, V28, and V32 are therefore 23, 28, and 32 mm, respectively. Keller S-300 type uses a higher power rating, but low centrifugal force and amplitude. Pennine type has a high centrifugal force and amplitude and its dimensions are all the largest of the three plant types. The spacings used for each piece of equipment to achieve the respective densification requirements are shown in Table 9.6. Onsite experiments were also conducted to study the effect of the vibroflotation compaction.
The results of one study are shown in Fig. 9.21. Vibroflotation compaction using the V32 model at the 3.2 m triangle grid pattern shown in the figure was conducted. CPT tests were conducted at five locations evenly distributed between two compacting points. The cone resistance profiles obtained before and after compaction at each CPT test points are given in the figure. The results show that the effect of vibroflotation compaction is affected by the distance to the compacting point or the position in the compaction grid. The cone resistance is the highest at the probe point and the lowest near the center point of the triangle (CPT points 2 and 4). However, cone resistance at the center of the four compaction points (point 3) is higher than that at points 2 and 4. On the other hand, the improvement appears to be effective through the entire depth ranging from 1–10 m with more significant improvement felt at the bottom (see CPT profiles for points 1 and 5).

Figure 9.21. Variation of cone resistance with distance from the probe point after compaction.
Each of the three compaction methods has its own advantages and disadvantages depending on the site and soil condition in the various areas. The dynamic compaction method produces a relatively more uniform degree of densification in each layer. However, the depth of densification is limited to 6 or 7 m. The MRC method is able to compact with a wider spacing and compact the sand at a relatively deeper depth. However, the probe needs to be maintained frequently as a result of wear and tear. The vibroflotation method can compact to a greater depth. The degree of densification is uniform along the depth, but can vary significantly with the distance from the probe points. It requires a smaller grid spacing and a sufficient supply of water.
It has been reported by Mitchell (1986) that there is an ageing effect, that is, an increase in the CPT cone resistance with time, after densification in sand has been carried out. Such an ageing effect varies with the mode of compaction as far as the observations made in this project are concerned. As reported by Bo and Choa (2004), the ageing effect was the highest in vibroflotation-compacted sand. The ageing effect was not significant in sand compacted by dynamic compaction. One example is given in Fig. 9.22. The ageing effect due to MRC compaction is in-between that of vibroflotation and dynamic compaction.

Figure 9.22. Increase in the CPT cone resistance due to ageing effect after densification.


